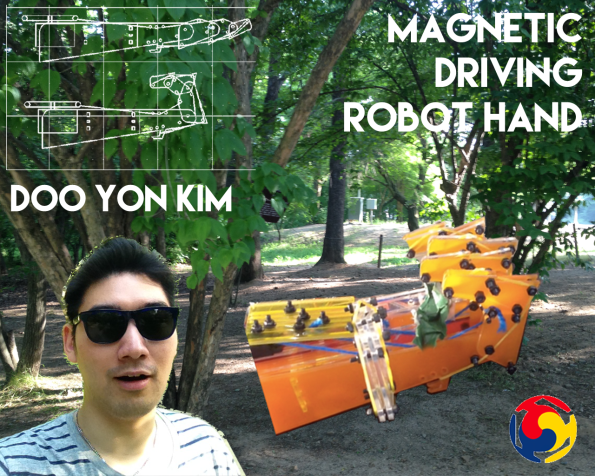
Human Muscle interpretation in robotic arm mechanism.
Motorized device has a limited mimicry on human/animal muscle movement. Being precise to satisfy industrial demands has allowed robots to replace human labor.
However, it lost a sense of human mimicry in natural movement. Just like musicians avoid exact tempo of the instruments at the MIDI software to make more humane sound, the movement of the robot hand mocks the human natural motion.
Implementing humanness on the robotic hand is based on the long time ago animal experiment. From this well known experiment on the dead body of the frog, we can see animal muscle is triggered by electrons.
Making frogs’ leg muscle popping by connecting electricity clearly shows disgust of the combination of the nature and the artificial implant. However, from the scientific sense of the experiment, it allowed me to make this human-like robot arm.
Instead of digital input to analog output, here both are analog reading and analog output. Magnet was used to convey natural human instability in human motion. Instability means imperfection which is a contrary to industrial robots with G-code.
As one can see, the servo motor is shaking as the magnetic flux sensor is approaching to the magnet. Just like when human limbs are responding to the objects ahead of touching them directly.
The exploration of this human mimicry will lower the barrier of the denial against artificial robots.